Intent-Space Allocation
TISA does not replace teleoperation with hiking. It reduces authority only to the richest intent space supported by the autonomy executor.
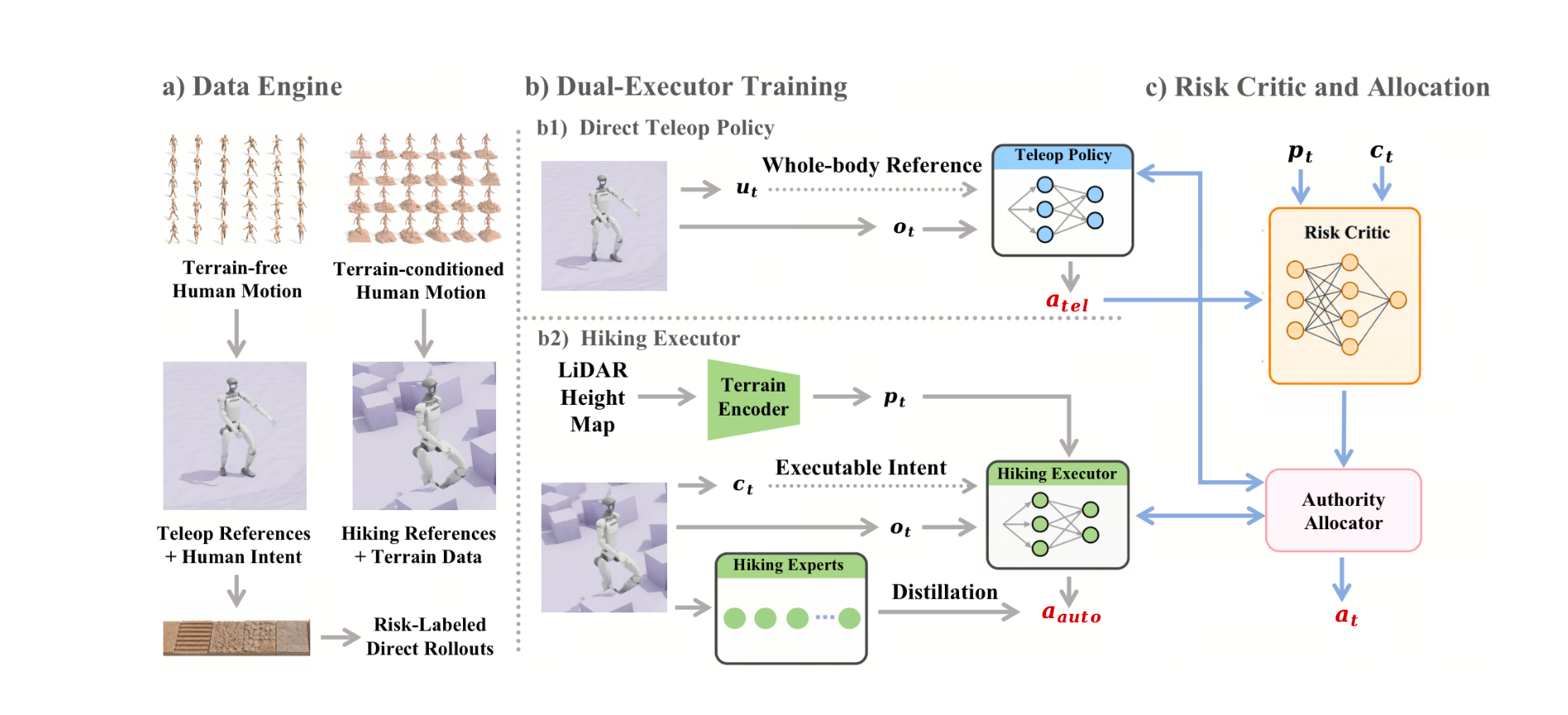
Humanoid teleoperation over uneven terrain must balance rich operator authority with contact safety. Direct whole-body teleoperation preserves posture, arm motion, and task-specific body intent, but it can fail when the commanded motion is incompatible with local terrain. Perceptive hiking controllers traverse such terrain more robustly, yet they typically expose only compact locomotion intent and are therefore not replacements for teleoperation.
We present TISA, a policy-agnostic supervisory layer that frames assistance as intent-space authority allocation. TISA executes direct whole-body teleoperation when the proposed action is predicted safe, and delegates only the executable portion of the operator's intent to a reduced-authority terrain executor when risk rises. Its key learned component is an intent- and action-conditioned risk critic that estimates short-horizon failure probability from the current observation, projected intent, and candidate direct action, rather than classifying terrain difficulty alone. Instantiated with a perceptive hiking executor, TISA reduces failures relative to direct tracking while preserving direct authority on low-risk segments; a rich-intent variant further preserves selected upper-body references during assisted traversal.
TISA does not replace teleoperation with hiking. It reduces authority only to the richest intent space supported by the autonomy executor.
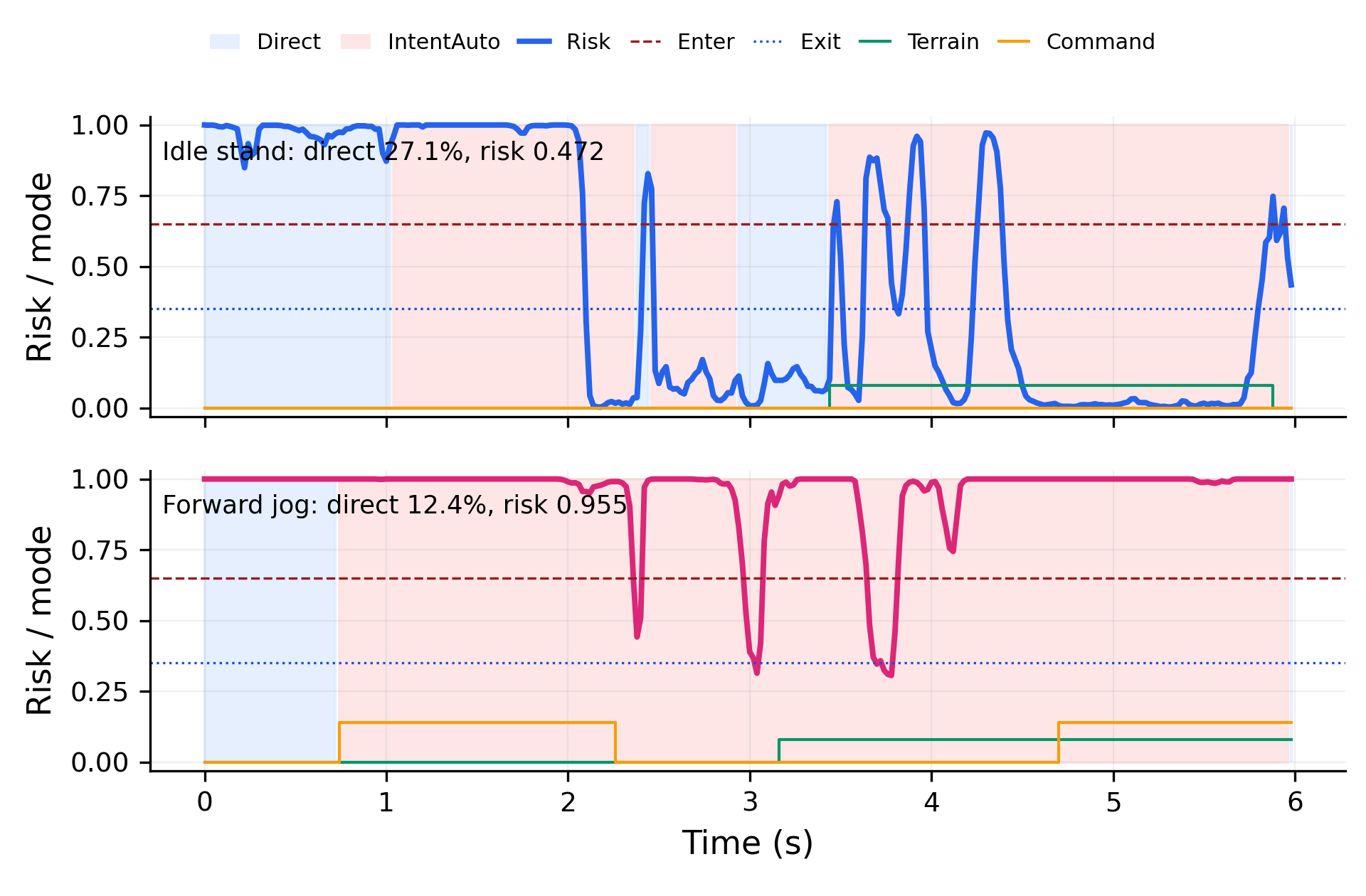
The critic estimates short-horizon failure probability from observation, projected intent, and the candidate direct action.
The allocator uses separate enter and exit thresholds, avoiding rapid mode changes while returning authority after risk subsides.
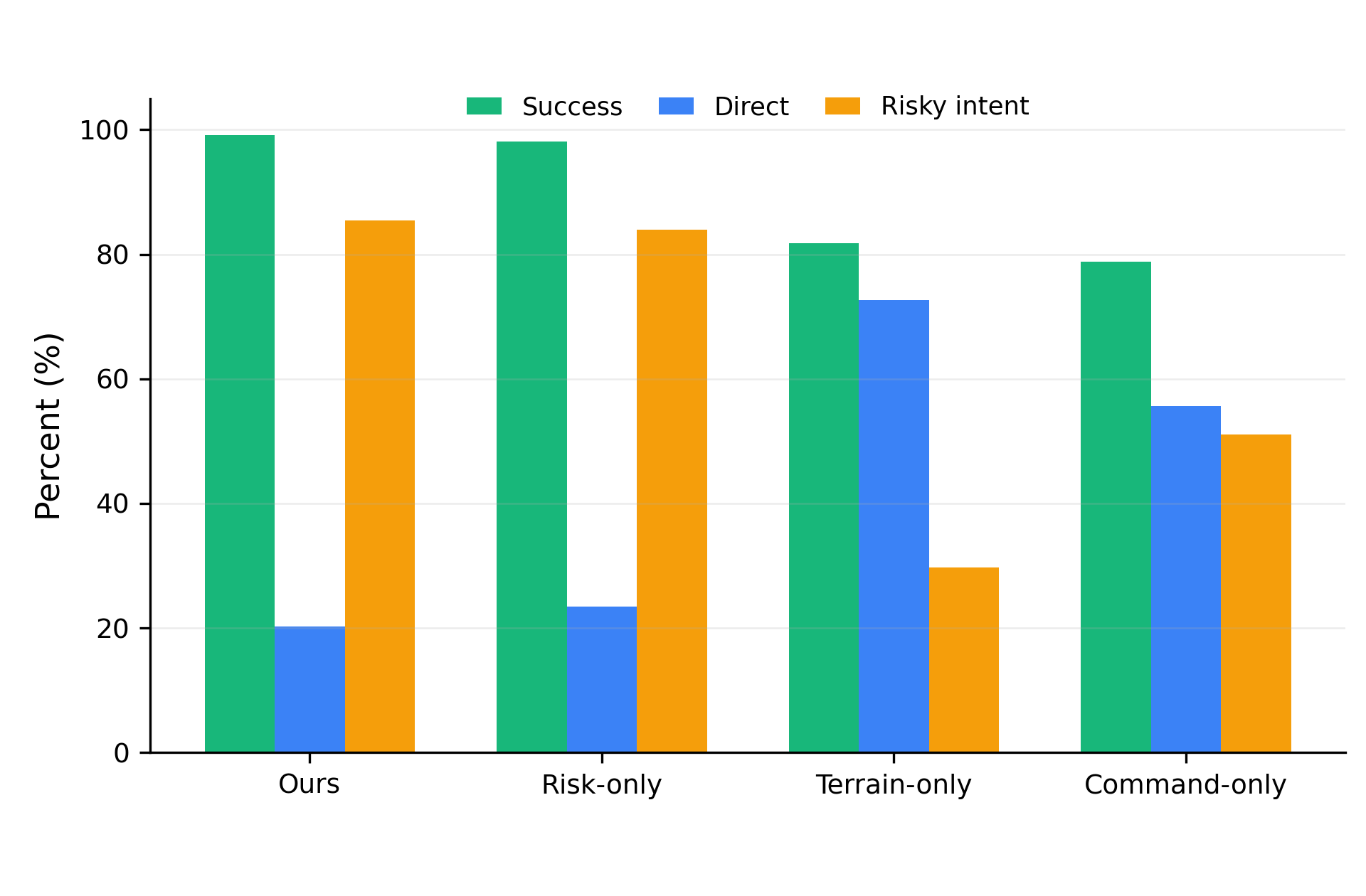
Across stairs, obstacles, height discontinuities, and cluttered transitions, TISA improves safety without collapsing the operator interface into pure hiking. In the paper's evaluation, pure tracking falls in 54.0% of episodes, while TISA reduces falls to 2.3%, executes 75.2% of low-risk steps in DIRECT mode, and routes 99.6% of risky steps to INTENTAUTO.
fall rate with TISA
low-risk steps kept direct
risky steps assisted
switches per episode

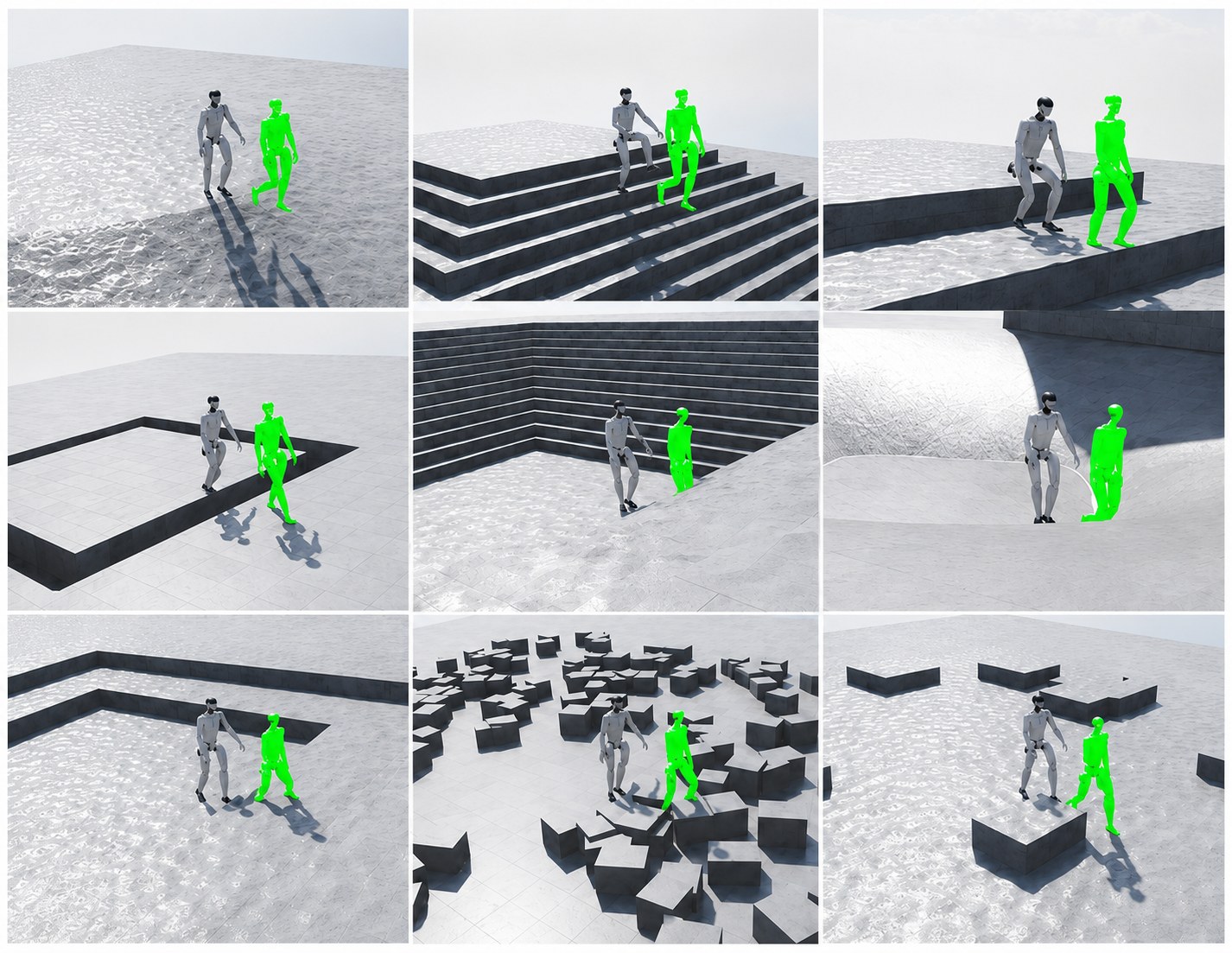
All videos show humanoid teleoperation with terrain-aware authority allocation.
Risky height transitions trigger assistance only around unsafe contacts.
Direct control returns after the contact transition has been cleared.
The system preserves task-specific body intent while changing execution authority.
Assistance is localized to cluttered and uneven contact regions.
TISA keeps operator authority visible throughout deployment.

Citation information will be added after the paper is publicly released.